Mcp23017 - Button interrupt example
This page contains an example for receiving an interrupt on a specific port of the board and sending it to the main board.
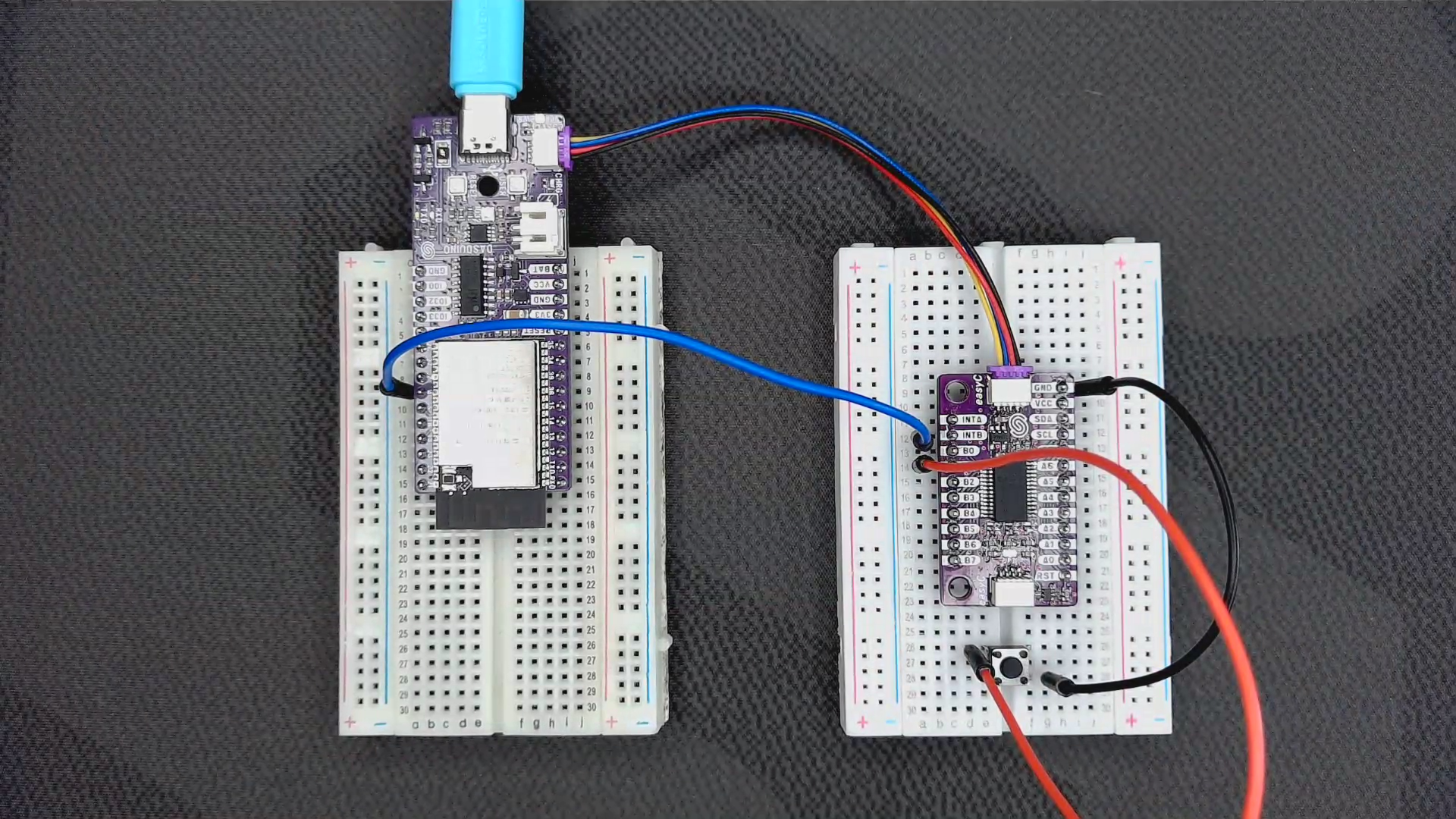
Connections for this example
Initialization
First, we must include the library and create an instance of the object. We also have to create the interrupt service routine and the variable that will be modified by that function:
#include "MCP23017-SOLDERED.h"
MCP_23017 mcp;
// is interrupted variable
volatile char state = 0;
// interrupt handler, should be as fast as possible
void interruptHandler()
{
state = 1;
}
Setup
In the setup() function, we initialize the I2C communication for the board. We also define the port on which we want to enable interrupts and the pin that will receive the interrupt on our main board:
void setup()
{
// Initialize MCP23017
mcp.begin();
// Initialize serial communication
Serial.begin(115200);
// Set pin 1 to input
mcp.pinMode(GPB1, INPUT_PULLUP);
// setup interrupts to be independent
mcp.interruptMode(MCP23017InterruptMode::Separated); // Note no _ in the name of enum, thats because we are using
// blemasle's class enums
// Enable interrupt on bank B (all GPB pins)
mcp.interrupt(MCP23017Port::B, FALLING);
// Adding interrupt to our boards inputs.
pinMode(4, INPUT_PULLUP);
// Set interrupt pin on our MCU board
attachInterrupt(digitalPinToInterrupt(4), interruptHandler, FALLING);
// Clear if mcp already interrupted
mcp.clearInterrupts();
}
mcp.begin()
Initializes the I/O extender via I2C
Returns value: None
mcp.pinMode(uint8_t pin, uint8_t mode)
Controls a single pin direction
Returns value: None
Function parameters:
| Type | Name | Description |
|---|---|---|
uint8_t | pin | pin number |
uint8_t | mode | OUTPUT, INPUT or INPUT_PULLUP |
mcp.interruptMode(MCP23017InterruptMode intMode)
Controls if the two interrupt pins mirror each other.
Returns value: None
Function parameters:
| Type | Name | Description |
|---|---|---|
MCP23017InterruptMode | intMode | Can have two values: Separated(The ports are independent) and Or(They are mirrored) |
mcp.interrupt(MCP23017Port port, uint8_t mode);
Configures interrupt registers using an Arduino-like API.
Returns value: None
Function parameters:
| Type | Name | Description |
|---|---|---|
MCP23017Port | port | Defines on what port we want the interrupt to happen, can be A or B |
uint8_t | mode | Defines on what signal change we want the interrupt to trigger, can be CHANGE, FALLING or RISING |
mcp.clearInterrupts()
Clears interrupts on both ports.
Returns value: None
Loop
In the loop() function, we are checking if an interrupt has occurred; if it has, we send a message to the serial monitor:
void loop()
{
if (!state)
{
// just to be sure that arduino and mcp are in the "same state"
// regarding interrupts
mcp.clearInterrupts();
return;
}
if (state)
{
// we are in interrupt, so we can do something
Serial.println("Interrupted!");
// clear interrupt
mcp.clearInterrupts();
state = 0;
}
delay(100);
}
Full example
See the full example here:
#include "MCP23017-SOLDERED.h"
MCP_23017 mcp;
// is interrupted variable
volatile char state = 0;
// interrupt handler, should be as fast as possible
void interruptHandler()
{
state = 1;
}
void setup()
{
// Initialize MCP23017
mcp.begin();
// Initialize serial communication
Serial.begin(115200);
// Set pin 1 to input
mcp.pinMode(GPB1, INPUT_PULLUP);
// setup interrupts to be independent
mcp.interruptMode(MCP23017InterruptMode::Separated); // Note no _ in the name of enum, thats because we are using
// blemasle's class enums
// Enable interrupt on bank B (all GPB pins)
mcp.interrupt(MCP23017Port::B, FALLING);
// Adding interrupt to our boards inputs.
pinMode(4, INPUT_PULLUP);
// Set interrupt pin on our MCU board
attachInterrupt(digitalPinToInterrupt(4), interruptHandler, FALLING);
// Clear if mcp already interrupted
mcp.clearInterrupts();
}
void loop()
{
if (!state)
{
// just to be sure that arduino and mcp are in the "same state"
// regarding interrupts
mcp.clearInterrupts();
return;
}
if (state)
{
// we are in interrupt, so we can do something
Serial.println("Interrupted!");
// clear interrupt
mcp.clearInterrupts();
state = 0;
}
delay(100);
}