Accelerometer and Gyroscope
The LSM6DS3 sensor on the Inkplate 4 TEMPERA provides accelerometer and gyroscope data, allowing motion detection, tilt sensing, and rotation tracking. It is used both for general movement sensing and to demonstrate 3D projections based on device tilt.
Initialization
Before retrieving sensor data, the LSM6DS3 must be powered on and initialized:
inkplate.wakePeripheral(INKPLATE_ACCELEROMETER);
if (inkplate.lsm6ds3.begin() != 0) {
inkplate.println("LSM6DS3 init failed");
inkplate.display();
esp_deep_sleep_start();
}
inkplate.wakePeripheral()
Powers on a peripheral device. Required before using the LSM6DS3.
Returns value: None
Function parameters:
| Type | Name | Description |
|---|---|---|
uint8_t | peripheral | Use INKPLATE_ACCELEROMETER to enable the LSM6DS3 sensor. |
inkplate.lsm6ds3.begin()
Initializes the LSM6DS3 accelerometer and gyroscope sensor.
Returns value: Returns 0 on success; non-zero on failure.
Reading Data
Once initialized, you can read accelerometer and gyroscope values directly:
Accelerometer
float ax = inkplate.lsm6ds3.readRawAccelX();
float ay = inkplate.lsm6ds3.readRawAccelY();
float az = inkplate.lsm6ds3.readRawAccelZ();
inkplate.lsm6ds3.readRawAccelX()
Reads X-axis raw accelerometer data.
Returns value: Float value representing acceleration.
inkplate.lsm6ds3.readRawAccelY()
Reads Y-axis raw accelerometer data.
Returns value: Float value representing acceleration.
inkplate.lsm6ds3.readRawAccelZ()
Reads Z-axis raw accelerometer data.
Returns value: Float value representing acceleration.
Gyroscope
float gx = inkplate.lsm6ds3.readFloatGyroX();
float gy = inkplate.lsm6ds3.readFloatGyroY();
float gz = inkplate.lsm6ds3.readFloatGyroZ();
inkplate.lsm6ds3.readFloatGyroX()
Reads X-axis gyroscope angular velocity.
Returns value: Float value in degrees/second.
inkplate.lsm6ds3.readFloatGyroY()
Reads Y-axis gyroscope angular velocity.
Returns value: Float value in degrees/second.
inkplate.lsm6ds3.readFloatGyroZ()
Reads Z-axis gyroscope angular velocity.
Returns value: Float value in degrees/second.
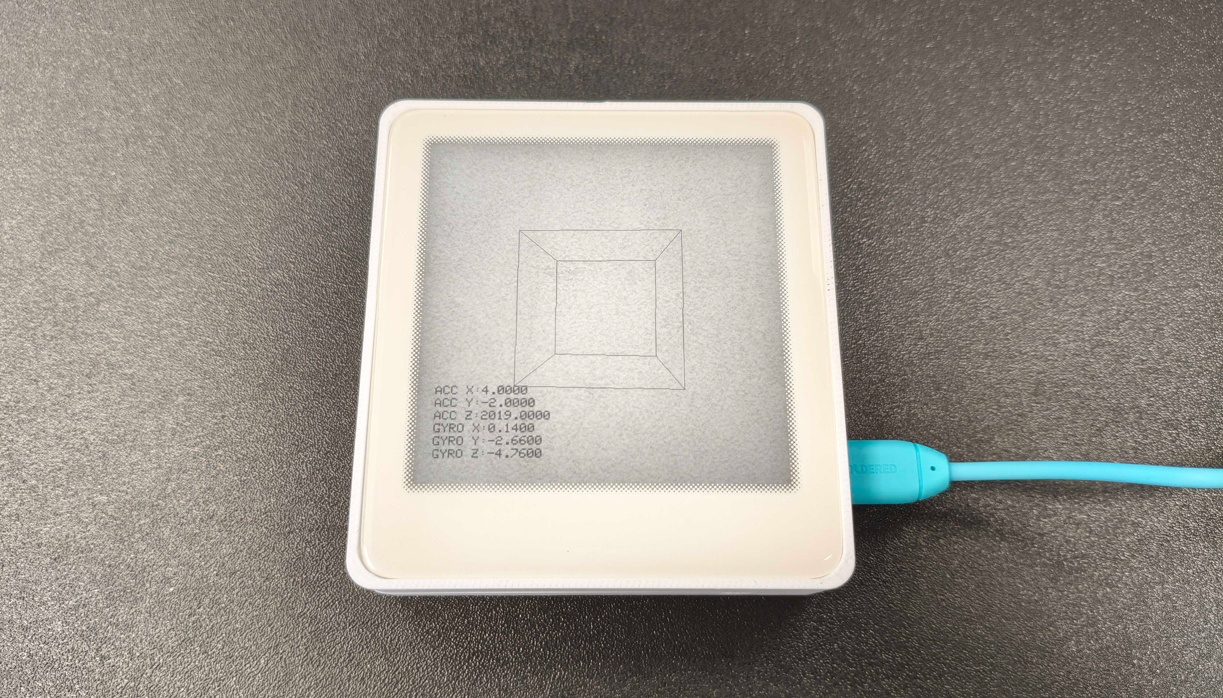
3D Projection Demo
In the official example, the LSM6DS3's accelerometer values are used to control the tilt of a 3D wireframe cube, illustrating how orientation data can be used for interactive graphics:
- 3D cube rendered using trigonometry and vector rotation
- Accelerometer values used to rotate the cube in real time
- Gyroscope and acceleration values printed on screen
- Optimized display refresh using
partialUpdate()and periodic fulldisplay()calls
partialUpdate() until 35 frames have passed, at which point a full display() refresh is performed.The projection function handles 3-axis rotation:
void project(float *v, float angleX, float angleY, float angleZ, int *x, int *y)
It uses the following sequence:
- Rotate the vertex around the X, Y, and Z axes
- Project to 2D screen space
- Adjust projection scale and center based on display size
This approach enables smooth, interactive rendering—an ideal demo for providing visual feedback based on motion.
Full Example
Inkplate4TEMPERA_Accelerometer_Gyroscope_Read.ino
Demonstrates accelerometer and gyroscope readings and 3D cube visualization.